telemetry issue
Prototype has been updated with all required software. Pixhawk is connected to Raspberry to allows to send and receive telemetry. Video works also well. Virtual joysticks are available and in the theory I have full control over drone without r/c controller now. It works similar to my Pi3 version with ttl2net converter.
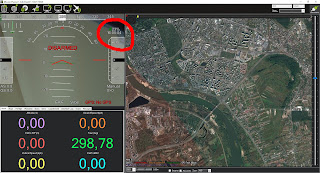
As I said it works similar but not the same because software is connected in different way and when I'm connecting to mission planner there is a problem with communication. Using UDP connection with ser2net more than 60% telemetry packets are lost. I don’t know why. I did mark it on following picture, it shows quality of UDP signal.
In the case of UDP connection thru tth2net converter everything works fine. No lost packets, signal strength =100%. Peoples over internet report it as a ser2net udp problem but now I think it is something wrong with mission planner. Qground control for me works better but this application do not have option to check quality of signal and I cannot confirm it finally. I hope I will confirm it soon in different way.
Summarizing setup works well but I thing I need to change little scope of this phase. Until there is a problem with signal quality I do not remove ttl2net converter from drone frame. Probably I will run px4 firmware to enable joysticks first and stay with RPi3. Pi0w will be platform for testing and I will replace it once bug is solved.
As I said it works similar but not the same because software is connected in different way and when I'm connecting to mission planner there is a problem with communication. Using UDP connection with ser2net more than 60% telemetry packets are lost. I don’t know why. I did mark it on following picture, it shows quality of UDP signal.

Summarizing setup works well but I thing I need to change little scope of this phase. Until there is a problem with signal quality I do not remove ttl2net converter from drone frame. Probably I will run px4 firmware to enable joysticks first and stay with RPi3. Pi0w will be platform for testing and I will replace it once bug is solved.
Comments
Post a Comment